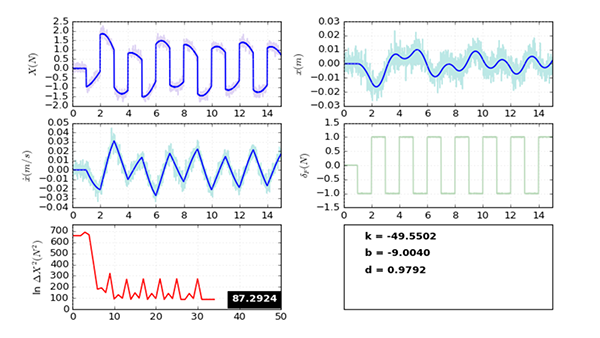
Mass-Spring-Damper Simulation & Estimation
Mass-Spring-Damper simulation using a model based on Python, Boost or Cython. Coefficient estimation is performed using a number of techniques including linear regression, gradient-based optimisation and sampling.